
Power-Law Compensator Design for Plants with Uncertainties: Experimental Verification
by
 , , and
, , and
Stavroula Kapoulea
1 ,
,
Costas Psychalinos
1,* ,
,
Ahmed S. Elwakil
2,3,4,* and
and
Mohammad Saleh Tavazoei
5
1
Department of Physics, Electronics Laboratory, University of Patras, GR-26504 Rio Patras, Greece
2
Department of Electrical and Computer Engineering, University of Sharjah, Sharjah 27272, United Arab Emirates
3
Nanoelectronics Integrated Systems Center (NISC), Nile University, Giza 12588, Egypt
4
Department of Electrical and Computer Engineering, University of Calgary, Calgary, AB T2N 1N4, Canada
5
Electrical Engineering Department, Sharif University of Technology, Tehran 14588-89694, Iran
*
Authors to whom correspondence should be addressed.
Electronics 2021, 10(11), 1305; https://doi.org/10.3390/electronics10111305
Submission received: 25 April 2021
/
Revised: 21 May 2021
/
Accepted: 26 May 2021
/
Published: 30 May 2021
(This article belongs to the Special Issue Fractional-Order Circuits & Systems Design and Applications)
Abstract
:A power-law compensator scheme for achieving robust frequency compensation in control systems including plants with an uncertain pole, is introduced in this work. This is achieved through an appropriate selection of the compensator parameters, which guarantee that the Nyquist diagram of the open-loop system compensator-plant crosses a fixed point independent of the plant pole variations. The implementation of the fractional-order compensator is performed through the utilization of a curve-fitting-based technique and the derived rational integer-order transfer function is realized on a Field-Programmable Analog Array device. The experimental results confirm that the the phase margin is well preserved, even for variation in the pole location of the plant.
1. Introduction
Fractional-order controllers are useful building blocks for compensating the existence of uncertainty in the model of a plant, which occurs in real-world control systems, and thus, many efforts towards the implementation of such blocks have been made [1,2,3]. The main feature of this family of controllers, which enables them to deal with uncertainty in control system loops, is the inherent flexibility of their structures [4], originating from the use of fractional operators with tunable orders. Robust fractional-order controllers can be designed based on the use of either time-domain methods [5] or frequency-domain ones [6]. Compared to time-domain approaches, frequency-domain methods provide a more powerful framework for optimal tuning of the tunable orders of the fractional operators in the structures of fractional controllers. For example, such controllers have been designed with the aim of offering flatness in the open-loop phase response around the gain crossover frequency [7,8,9,10,11,12,13,14,15] and have also been introduced to ensure robustness against variations in the time constant of a plant. In [16] a fractional-order controller was designed so that the phase margin and gain crossover frequency could have specific desired values. In [17] a fractional-order controller was proposed for stable minimum-phase plants with large uncertainty in the location of one of their poles. Following this, the rules introduced in [17] have been modified in [18] to include plants with fractional-order transfer functions and uncertain poles. The controller obtained from the method of [18] is able to exactly satisfy the required frequency-domain objectives, where the uncertain parameters in the plant model can vary in an infinite range. A further extension was done in [19] for the case of single-order power-law plant transfer functions. Furthermore, a fixed-structure fractional-order controller has been designed in [20] to obtain the desired values for the phase margins and adjust the crossover frequencies. The method of [20] has been improved in [21] so that the uniqueness of the crossover frequencies is guaranteed.
In the present work, the tuning rules of [18] are applied in the case of plants with dynamics described by double-order power-law transfer functions, leading to the need for power-law compensators. The derived compensator transfer function is approximated through the utilization of a curve-fitting technique, resulting in a rational integer-order transfer function. This transfer function is capable of fulfilling the robust compensation problem of control systems, including plants with an uncertain pole [18] and can be implemented using conventional filter design techniques. As a design application example, a control system used in machining is presented and the performance of the introduced compensator, and also of the whole system, are evaluated through experimental results using a quad-core Filed-Programmable Analog Array (FPAA) platform.
2. Power-Law Compensator for Robustness against Plant Uncertainty
2.1. Theory
Consider a compensator-plant system, where the transfer function of the compensator is
with , and the transfer function of the plant is given by
including an unknown parameter (b), possibly with a wide range of variation. The aim is to design the compensator such that the following objectives are met:
- In the nominal case (i.e., ), the Nyquist diagram of the open-loop transfer function meets the fixed point , where and , at a desired frequency ;
- Despite the variations of b from its nominal value, the Nyquist diagram of the transfer function still crosses the fixed point .
The above objectives are simultaneously satisfied by the compensator if designed such that the following conditions hold:
and
This can be proved using (3)–(5) and Theorem I in [18], where it is deduced that . Therefore, meets the first objective. In this case, each b, is found, such that , thus confirming that the second objective is also satisfied. An important remark is that, for , the variable is related to the phase margin () of the system according to the formula , while the characteristic frequency is equal to the crossover gain frequency, i.e., .
2.2. Design Example
In order to demonstrate that this concept is robust in stabilizing the PM of a controlled system in plants with uncertainties, we consider the problem of estimating the heat flux during machining, described in detail in [22]. The dynamics of the plant are described by a transfer function of the form
with nominal value . Using the expressions in (3)–(5), and considering that , (i.e., = 90° and that the crossover gain frequency is = 20 rad/s, then the transfer function of the required compensator becomes
The achieved robustness at the presence of uncertainty in the pole of the plant is demonstrated by considering a variation in the nominal value of b. The corresponding open-loop transfer function Nyquist plots, plotted in Figure 1 show that the PM was 89.97° at deviation and 89.98° at deviation; both are very close to the theoretical value of 90°.
The transfer function of the power-law compensator, given in (7), can be approximated using a curve-fitting technique based on the MATLAB built-in function fitfrd, which approximates the desired function within a pre-defined frequency range [23]. Another potential tool is the Padé approximation, which actually approximates the transfer function around a pre-defined center frequency. Here, the curve-fitting-based technique was employed since, in most cases, it provides improved accuracy over the Padé approximation tool [24,25]. The obtained rational integer-order transfer function which performs the approximation of its power-paw counterpart within the frequency range rad/s, is given by
A possible implementation of the function in (8) is that based on the standard Follow-the-Leader-Feedback (FLF) multi-feedback structure which is described by the transfer function
The variables are time constants, while the variables are gain factors and both are calculated through the equalization of the coefficients of the numerator and denominator in the polynomials in (8) and (9). The resulting values are provided in Table 1. It should be mentioned that (8) can also be implemented by other well-known structures, such as the Inverse-Follow-the Leader (IFLF) topology or the parallel filters topology. The IFLF topology is preferable in cases where differential signals are used while parallel filters are advantageous in the case of current-mode signals.
3. Experimental Verification
Field-Programmable Analog Arrays (FPAAs) are analog signal processors based on configurable analog blocks (CABs) that offer design programmability and versatility [26,27]. The functionality of the proposed compensator is evaluated through an experimental FPAA-based process, using the Anadigm AN231K04 FPAA [28]. The experimental setup is shown in Figure 2, where an extra interface stage, implemented on the breadboard using discrete AD844 operational amplifiers, is also used for the single-to-differential conversion of the input signal and the opposite conversion of the output signal of the FPAA. The power supply voltage is set as ±15 V, while the chip clock is set as 1 kHz.
3.1. Compensator-Plant System
The transfer function in (9) with the values of Table 1 was realized on the FPAA, as shown in the Anadigm design of Figure 3. Note that all gain factors were scaled by a factor equal to 0.02 to achieve reasonable results that avoid saturating the internal FPAA op-amps. This means that the realized function is . The integration stages of the FLF structure are implemented using Integrator CABs, while for the time constants of higher values, gain stages are also required. The feedback loop at the input point and the summation at the output point of the structure are realized through the two Sum/Diff CABs of the FPAA configuration.
The efficient operation of the realized compensator is evaluated through the obtained gain and phase frequency responses, depicted in Figure 4a, which are presented along with those predicted by the ideal compensator function in (7) and the approximated one in (8). The agreement between the experimental results and the corresponding approximated and ideal ones is evident and is further verified through the error plots of Figure 4b. The time-domain operation of the compensator is evaluated through the input and output waveforms at the crossover gain frequency rad/s with the obtained oscilloscope screenshot provided in Figure 4c. The measured gain and phase are 1.58 dB and 33°, with the corresponding theoretically predicted values being 1.56 dB and 33°, respectively.
Using the same configuration of Figure 3, the open-loop behavior of the system, i.e., the transfer function , can be evaluated. This is done after approximating the open-loop transfer function using the curve-fitting method in the form
with the corresponding FLF structure parameters summarized in Table 2.
The open-loop frequency experimental behavior of the system is presented by the gain and phase plots in Figure 5a. The measured crossover gain frequency is 20 rad/s and the associated phase margin is 91°, close to the corresponding specification of 90°, while the corresponding relative errors are given by the plots of Figure 5b. The correct operation of the open-loop system is also verified by the time-domain plots in Figure 5c, where the oscilloscope screenshot (which presents the input and output waveforms at the characteristic frequency rad/s) are demonstrated.
The closed-loop compensator-plant system is implemented using an extra Sum/Diff CAB, in order to realize the feedback loop. The behavior of the system is evaluated through the step response (shown in the oscilloscope screenshot of Figure 6) with its efficiency being verified by the obtained results in the measurement of characteristic parameters. In particular, the measured values of the rise time, settling time and overshoot are 98 ms, 278 ms, and 0.1%, while the theoretically predicted values are 106.9 ms, 285.5 ms, and 0.1339%, respectively.
3.2. Effect of the Plant Uncertainties
The effect of the uncertainty in the pole of the transfer function of the plant is experimentally studied, assuming that the variable is changed by of its nominal value. The behavior of the open-loop system towards these variations is evaluated through the input and output waveforms at the gain crossover frequency of 20 rad/s (see Figure 7a,b), where it is confirmed that the phase margin remains unaffected with values very close to the theoretically predicted value of 90°. The corresponding closed-loop system results, which are given by the oscilloscope screenshots of the step responses in Figure 7c,d, also verify, in this case, that the plant uncertainties do not affect the robustness of the fixed point. More specifically, the rise time is measured as ms and the settling time is measured as ms, respectively at and of the nominal pole value, with the ideal rise time being 98 ms and settling time being 278 ms.
4. Conclusions
Robust compensation of the frequency response characteristics of plants described by power-law dynamics can be achieved through the utilization of compensators, also described by a power-law transfer function. This is achieved through the establishment of suitable tuning rules, which perform appropriate shaping of the open-loop Nyquist plot in such a way that it always crosses a desired point. This is very important from a practical perspective because the invariant phase and gain margins can be considered as special cases of the aforementioned feature, making the derived control system robust in fractional-order plants with an uncertain pole. A selected design example is experimentally verified using an FPAA-based implementation, verifying the theoretical results.
Author Contributions
Conceptualization, C.P. and A.S.E.; methodology, C.P.; software, S.K.; validation, S.K. and C.P.; formal analysis, M.S.T.; investigation, S.K. and C.P.; writing—original draft preparation, S.K. and C.P.; writing—review and editing, C.P., A.S.E. and M.S.T.; project administration, C.P. and A.S.E. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Acknowledgments
This research is co-financed by Greece and the European Union (European Social Fund-ESF) through the Operational Programme “Human Resources Development, Education and Lifelong Learning” in the context of the project “Strengthening Human Resources Research Potential via Doctorate Research-2nd Cycle” (MIS-5000432), implemented by the State Scholarships Foundation (IKY).
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| CAB | Configurable analog block |
| FLF | Follow the leader feedback |
| FPAA | Field programmable analog array |
| IFLF | Inverse follow the leader feedback |
| FBD | Functional block diagram |
| PM | Phase margin |
References
- Caponetto, R.; Dongola, G.; Maione, G.; Pisano, A. Integrated technology fractional order proportional-integral-derivative design. J. Vib. Control 2014, 20, 1066–1075. [Google Scholar] [CrossRef]
- Muñiz-Montero, C.; García-Jiménez, L.V.; Sánchez-Gaspariano, L.A.; Sánchez-López, C.; González-Díaz, V.R.; Tlelo-Cuautle, E. New alternatives for analog implementation of fractional-order integrators, differentiators and PID controllers based on integer-order integrators. Nonlinear Dyn. 2017, 90, 241–256. [Google Scholar] [CrossRef]
- Dimeas, I.; Petras, I.; Psychalinos, C. New analog implementation technique for fractional-order controller: A DC motor control. AEU Int. J. Electron. Commun. 2017, 78, 192–200. [Google Scholar] [CrossRef]
- Tavakoli-Kakhki, M.; Haeri, M.; Tavazoei, M.S. Simple fractional order model structures and their applications in control system design. Eur. J. Control 2010, 16, 680–694. [Google Scholar] [CrossRef]
- Tavazoei, M.S. Time response analysis of fractional-order control systems: A survey on recent results. Fract. Calc. Appl. Anal. 2014, 17, 440–461. [Google Scholar] [CrossRef] [Green Version]
- Padula, F.; Visioli, A. Advances in Robust Fractional Control; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Luo, Y.; Chen, Y. Fractional-order [Proportional Derivative] controller for robust motion control: Tuning procedure and validation. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 1412–1417. [Google Scholar]
- Luo, Y.; Chen, Y.Q.; Wang, C.Y.; Pi, Y.G. Tuning fractional order proportional integral controllers for fractional order systems. J. Process. Control 2010, 20, 823–831. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, Y. Stabilizing and robust fractional order PI controller synthesis for first order plus time delay systems. Automatica 2012, 48, 2159–2167. [Google Scholar] [CrossRef]
- Luo, Y.; Zhang, T.; Lee, B.; Kang, C.; Chen, Y. Fractional-order proportional derivative controller synthesis and implementation for hard-disk-drive servo system. IEEE Trans. Control Syst. Technol. 2013, 22, 281–289. [Google Scholar] [CrossRef] [Green Version]
- Basiri, M.H.; Tavazoei, M.S. On robust control of fractional order plants: Invariant phase margin. J. Comput. Nonlinear Dyn. 2015, 10, 054504. [Google Scholar] [CrossRef]
- Dastjerdi, A.A.; Saikumar, N.; HosseinNia, S.H. Tuning guidelines for fractional order PID controllers: Rules of thumb. Mechatronics 2018, 56, 26–36. [Google Scholar] [CrossRef]
- Dastjerdi, A.A.; Vinagre, B.M.; Chen, Y.; HosseinNia, S.H. Linear fractional order controllers; A survey in the frequency domain. Annu. Rev. Control 2019, 47, 51–70. [Google Scholar] [CrossRef]
- Li, X.; Gao, L. Robust Fractional-order PID Tuning Method for a Plant with an Uncertain Parameter. Int. J. Control Autom. Syst. 2021, 19, 1302–1310. [Google Scholar] [CrossRef]
- Tepljakov, A.; Alagoz, B.B.; Yeroglu, C.; Gonzalez, E.A.; Hosseinnia, S.H.; Petlenkov, E.; Ates, A.; Cech, M. Towards Industrialization of FOPID Controllers: A Survey on Milestones of Fractional-Order Control and Pathways for Future Developments. IEEE Access 2021, 9, 21016–21042. [Google Scholar] [CrossRef]
- Jin, Y.; Chen, Y.Q.; Xue, D. Time-constant robust analysis of a fractional order [proportional derivative] controller. IET Control Theory Appl. 2011, 5, 164–172. [Google Scholar] [CrossRef]
- Feliu-Batlle, V.; Castillo-García, F.J. On the robust control of stable minimum phase plants with large uncertainty in a time constant. A fractional-order control approach. Automatica 2014, 50, 218–224. [Google Scholar] [CrossRef]
- Sayyaf, N.; Tavazoei, M.S. Robust fractional-order compensation in the presence of uncertainty in a pole/zero of the plant. IEEE Trans. Control Syst. Technol. 2018, 26, 797–812. [Google Scholar] [CrossRef]
- Basiri, M.H.; Tavazoei, M.S. Robust Control of a Class of Fractional Order Plants in the Presence of Pole Uncertainty. In Proceedings of the Electrical Engineering (ICEE), Iranian Conference on, Mashhad, Iran, 8–10 May 2018; pp. 881–886. [Google Scholar]
- Sayyaf, N.; Tavazoei, M.S. Desirably adjusting gain margin, phase margin, and corresponding crossover frequencies based on frequency data. IEEE Trans. Ind. Inform. 2017, 13, 2311–2321. [Google Scholar] [CrossRef]
- Sayyaf, N.; Tavazoei, M.S. Frequency data-based procedure to adjust gain and phase margins and guarantee the uniqueness of crossover frequencies. IEEE Trans. Ind. Electron. 2020, 67, 2176–2185. [Google Scholar] [CrossRef]
- Sommacal, L.; Melchior, P.; Oustaloup, A. Havriliak-Negami function for thermal system identification. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 1316–1321. [Google Scholar]
- Kapoulea, S.; Psychalinos, C.; Elwakil, A.S. Power law filters: A new class of fractional-order filters without a fractional-order Laplacian operator. AEU Int. J. Electron. Commun. 2021, 129, 153537. [Google Scholar] [CrossRef]
- Kapoulea, S.; Tsirimokou, G.; Psychalinos, C.; Elwakil, A.S. Employment of the Padé approximation for implementing fractional-order lead/lag compensators. AEU Int. J. Electron. Commun. 2020, 120, 153203. [Google Scholar] [CrossRef]
- Kapoulea, S.; Psychalinos, C.; Elwakil, A.S. Double Exponent Fractional-Order Filters: Approximation Methods and Realization. Circuits Syst. Signal Process. 2021, 40, 993–1004. [Google Scholar] [CrossRef]
- Muñiz-Montero, C.; Sánchez-Gaspariano, L.A.; Sánchez-López, C.; González-Díaz, V.R.; Tlelo-Cuautle, E. On the electronic realizations of fractional-order phase-lead-lag compensators with OpAmps and FPAAs. In Fractional Order Control and Synchronization of Chaotic Systems; Springer: Berlin/Heidelberg, Germany, 2017; pp. 131–164. [Google Scholar]
- Tlelo-Cuautle, E.; Pano-Azucena, A.D.; Guillén-Fernández, O.; Silva-Juárez, A. Analog/Digital Implementation of Fractional Order Chaotic Circuits and Applications; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Anadigm. AN231E04 dpASP: The AN231E04 dpASP Dynamically Reconfigurable Analog Signal Processor; Anadigm: Mesa, AZ, USA, 2021. [Google Scholar]
Figure 1.
Nyquist plots of the controlled system (6) at the presence of plant uncertainties (blue: , red: , green: ).
Figure 1.
Nyquist plots of the controlled system (6) at the presence of plant uncertainties (blue: , red: , green: ).
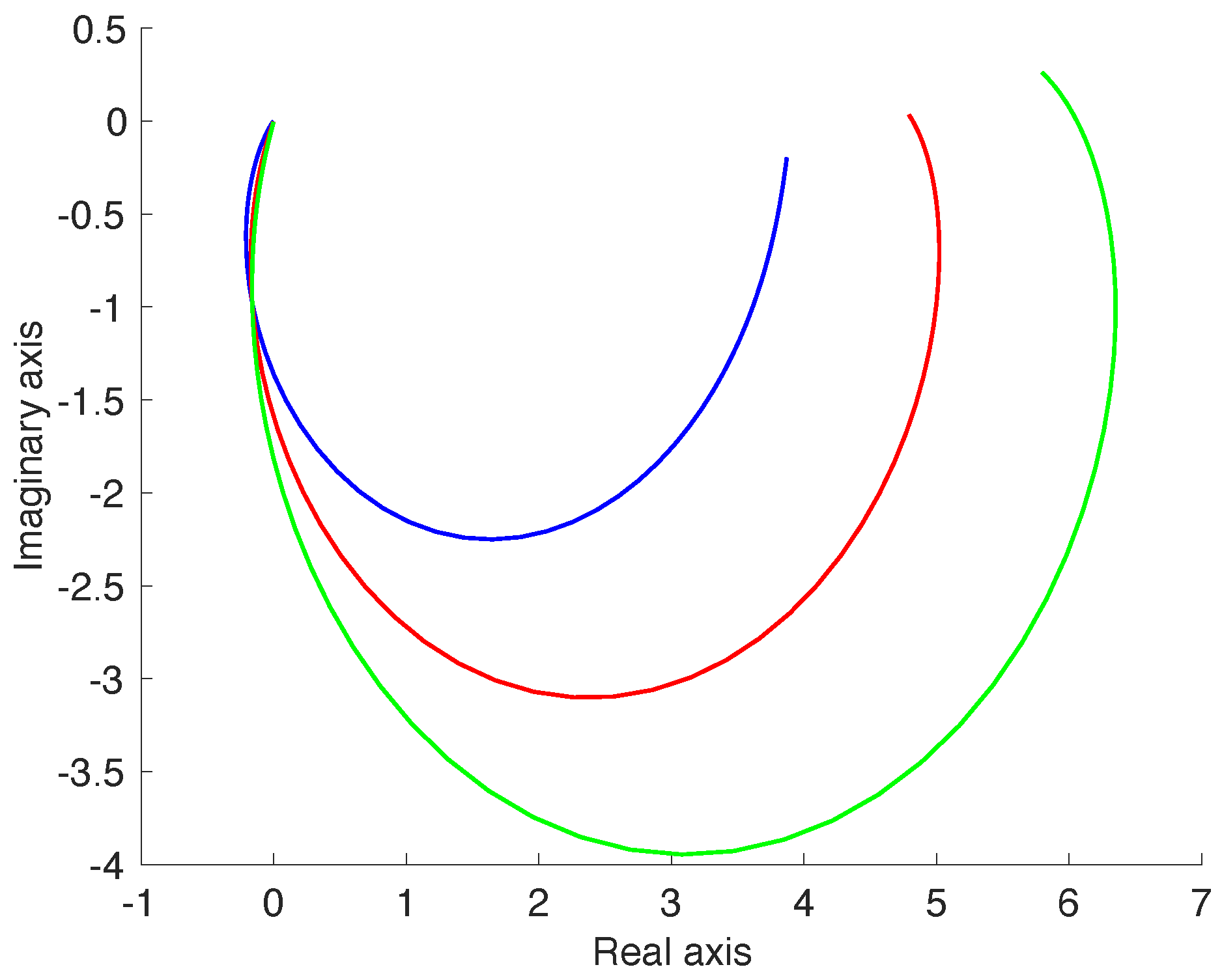
Figure 2.
Experimental setup for evaluating the performance of the proposed power-law compensator.
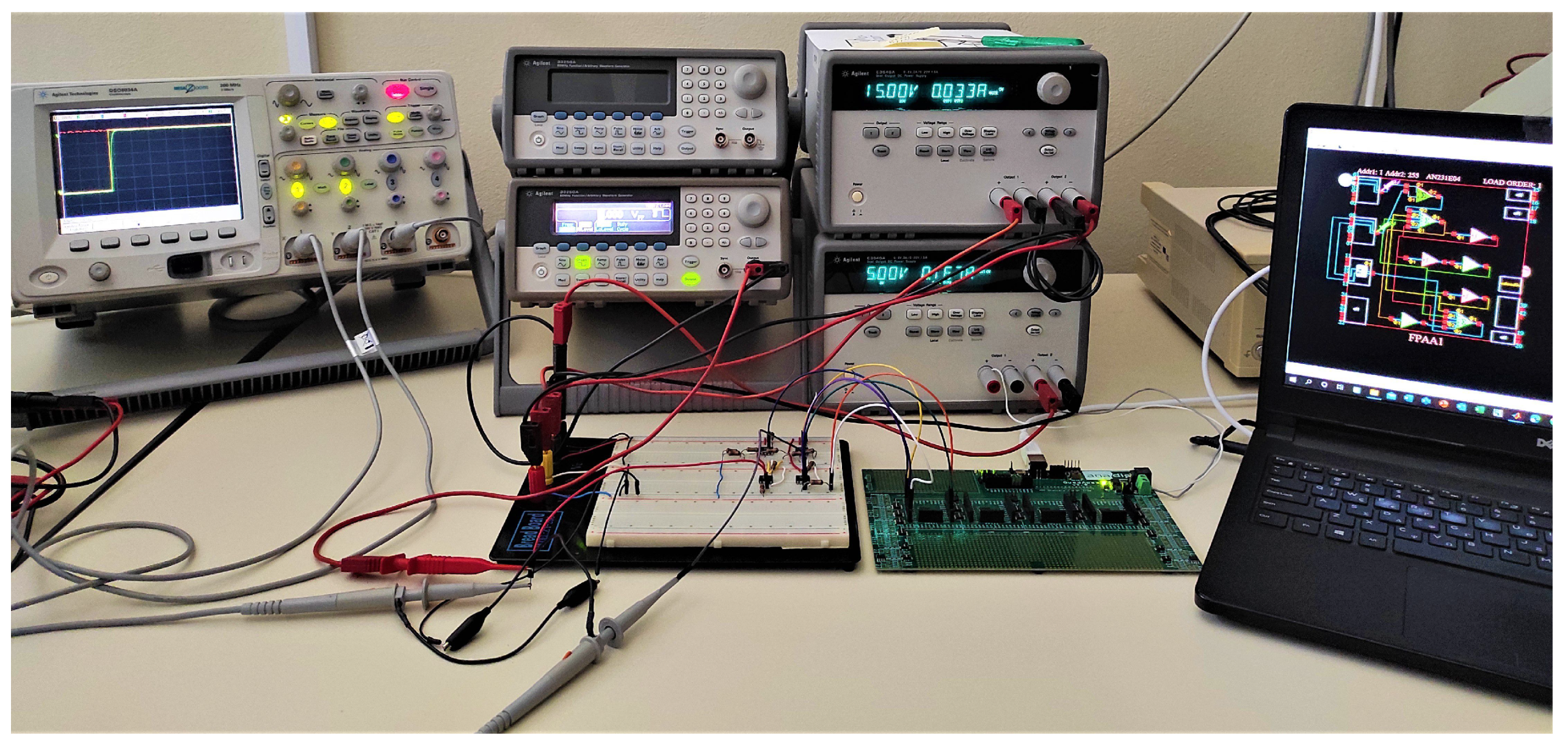
Figure 3.
FLF structure and its realization on the FPAA.

Figure 4.
Experimental results of the realized power-law compensator (a) gain/phase responses and (b) their relative errors, and (c) input/output voltage waveforms at rad/s.
Figure 4.
Experimental results of the realized power-law compensator (a) gain/phase responses and (b) their relative errors, and (c) input/output voltage waveforms at rad/s.

Figure 5.
Experimental results of the open-loop system (a) gain/phase frequency responses and (b) their relative errors, and (c) input/output voltage waveforms at the gain cross-over frequency rad/s.
Figure 5.
Experimental results of the open-loop system (a) gain/phase frequency responses and (b) their relative errors, and (c) input/output voltage waveforms at the gain cross-over frequency rad/s.
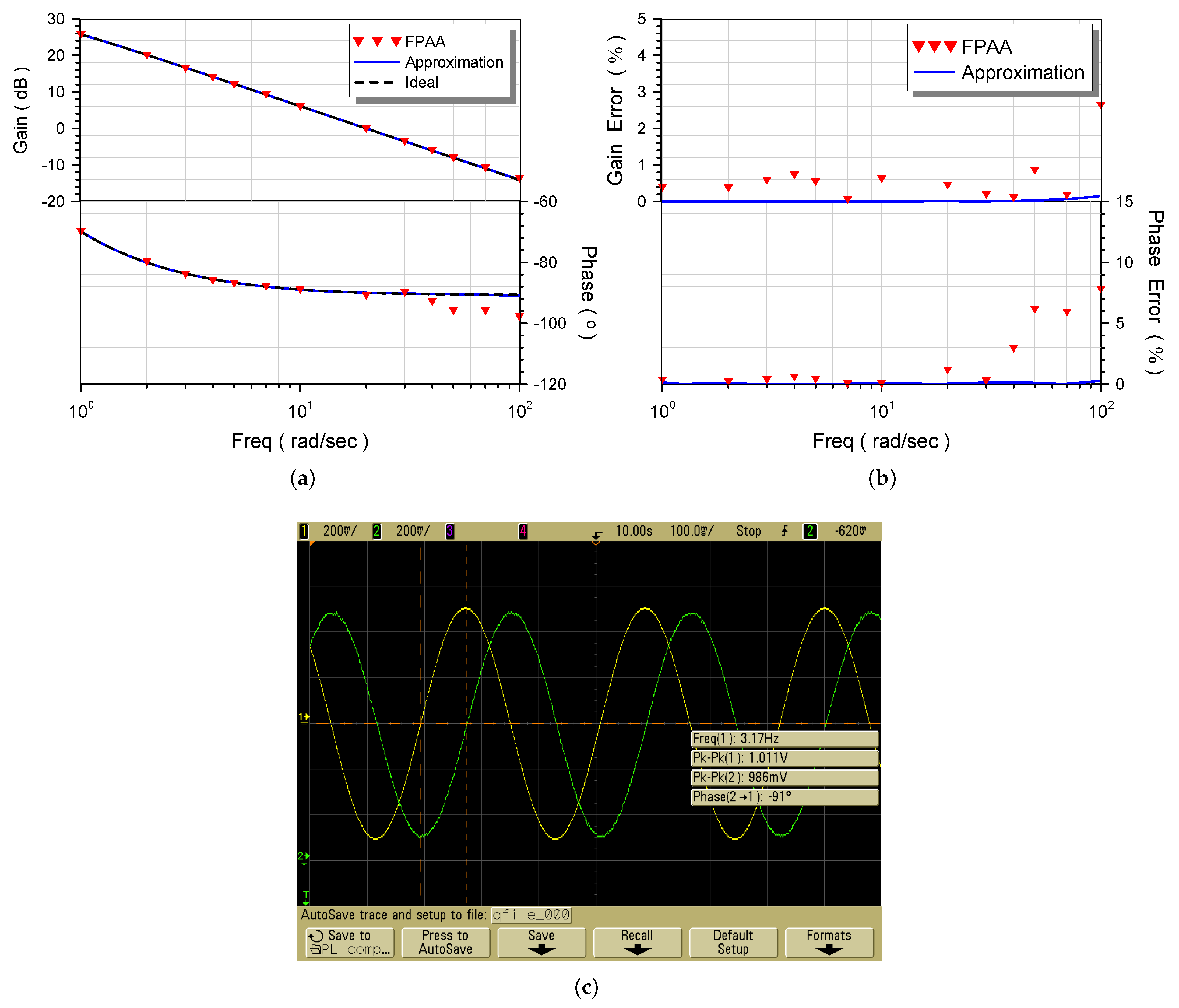
Figure 6.
Experimental step response the closed-loop system at the nominal value of the pole of the plant.
Figure 6.
Experimental step response the closed-loop system at the nominal value of the pole of the plant.
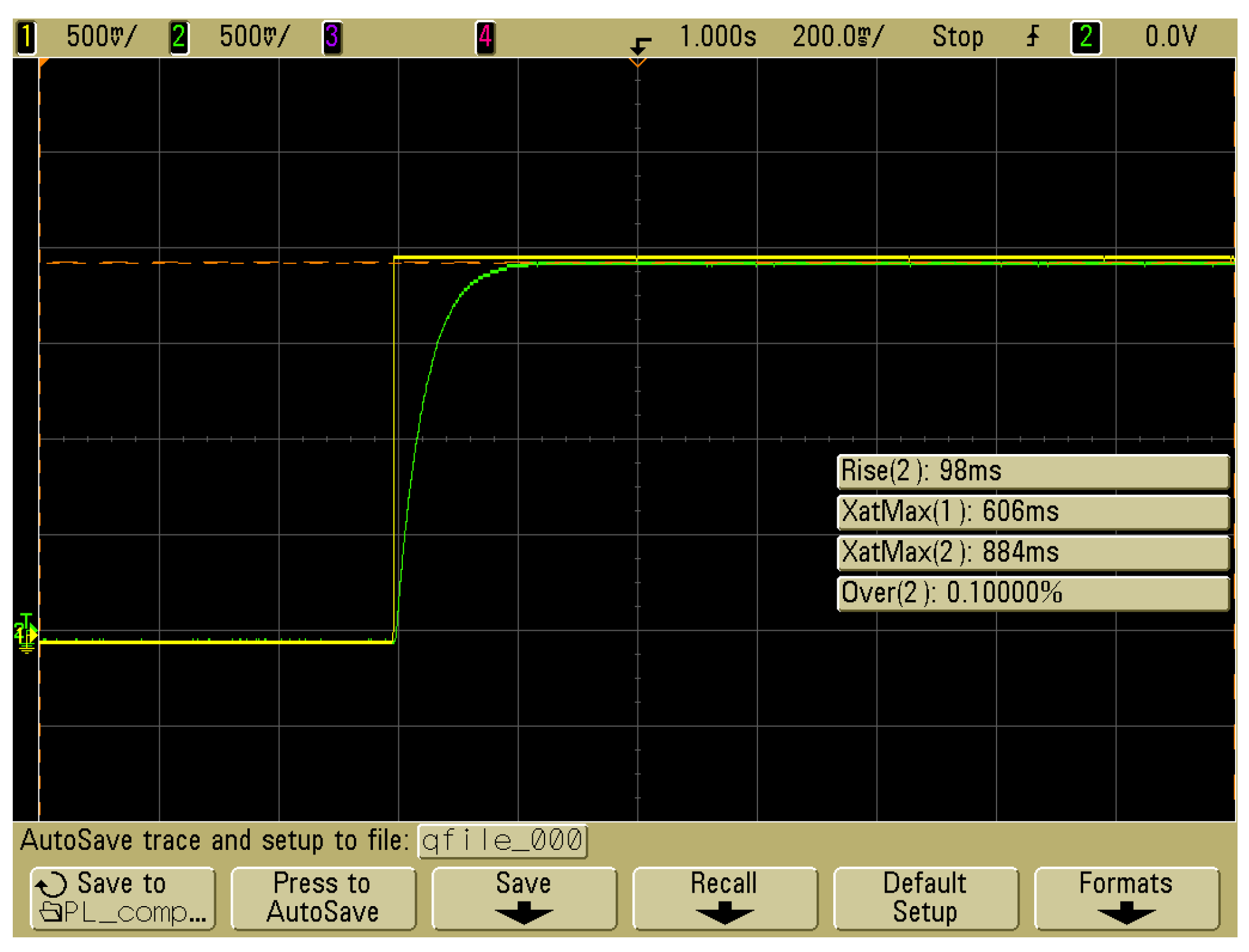
Figure 7.
Input and output waveforms of the open-loop system at the characteristic frequency rad/s in the presence of the plant’s pole uncertainty and corresponding step responses (a,c) and (b,d) .
Figure 7.
Input and output waveforms of the open-loop system at the characteristic frequency rad/s in the presence of the plant’s pole uncertainty and corresponding step responses (a,c) and (b,d) .


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Values of time constants and gain factors of the FLF structure for realizing the transfer function in (8).
Table 1.
Values of time constants and gain factors of the FLF structure for realizing the transfer function in (8).
| Time Constants | Scaling Factors | |||||
|---|---|---|---|---|---|---|
| 4.9 ms | 53.3 ms | 497.7 ms | 13.235 | |||
Table 2.
Values of time constants and gain factors of the FLF structure for realizing the transfer function in (10).
Table 2.
Values of time constants and gain factors of the FLF structure for realizing the transfer function in (10).
| Time Constants | Scaling Factors | |||||
|---|---|---|---|---|---|---|
| 77.1 ms | 742.1 ms | 3.558 s | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Kapoulea, S.; Psychalinos, C.; Elwakil, A.S.; Tavazoei, M.S. Power-Law Compensator Design for Plants with Uncertainties: Experimental Verification. Electronics 2021, 10, 1305. https://doi.org/10.3390/electronics10111305
AMA Style
Kapoulea S, Psychalinos C, Elwakil AS, Tavazoei MS. Power-Law Compensator Design for Plants with Uncertainties: Experimental Verification. Electronics. 2021; 10(11):1305. https://doi.org/10.3390/electronics10111305
Chicago/Turabian StyleKapoulea, Stavroula, Costas Psychalinos, Ahmed S. Elwakil, and Mohammad Saleh Tavazoei. 2021. "Power-Law Compensator Design for Plants with Uncertainties: Experimental Verification" Electronics 10, no. 11: 1305. https://doi.org/10.3390/electronics10111305
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.